Контроллер беспроводных датчиков
В задачи данного модуля входит получение из радио-эфира пакетов от различных радио-датчиков? и отправка соответствующих уведомлений в центральную систему с помощью HTTP-запроса. Система правил позволяет самостоятельно обрабатывать входящие сигналы, но в данном примере эта возможность не рассматривается
Скетч Arduino
#include <VirtualWire.h>
#include <EasyTransferVirtualWire.h>
#include <EEPROM.h> //Needed to access the eeprom read write functions
const int led_pin = 13;
const int receive_pin = 2;
unsigned int unique_device_id = 0;
unsigned int uptime = 0;
unsigned int old_uptime = 0;
String inData;
//create object
EasyTransferVirtualWire ET;
unsigned int last_packet_id = 0;
struct SEND_DATA_STRUCTURE{
//put your variable definitions here for the data you want to send
//THIS MUST BE EXACTLY THE SAME ON THE OTHER ARDUINO
//Struct can'e be bigger then 26 bytes for VirtualWire version
unsigned int device_id;
unsigned int destination_id;
unsigned int packet_id;
byte command;
int data;
};
//give a name to the group of data
SEND_DATA_STRUCTURE mydata;
//This function will write a 2 byte integer to the eeprom at the specified address and address + 1
void EEPROMWriteInt(int p_address, unsigned int p_value)
{
byte lowByte = ((p_value >> 0) & 0xFF);
byte highByte = ((p_value >> 8) & 0xFF);
EEPROM.write(p_address, lowByte);
EEPROM.write(p_address + 1, highByte);
}
//This function will read a 2 byte integer from the eeprom at the specified address and address + 1
unsigned int EEPROMReadInt(int p_address)
{
byte lowByte = EEPROM.read(p_address);
byte highByte = EEPROM.read(p_address + 1);
return ((lowByte << 0) & 0xFF) + ((highByte << 8) & 0xFF00);
}
void setup()
{
pinMode(led_pin, OUTPUT);
Serial.begin(9600); // Debugging only
ET.begin(details(mydata));
// Initialise the IO and ISR
vw_set_rx_pin(receive_pin);
vw_setup(2000); // Bits per sec
vw_rx_start(); // Start the receiver PLL running
// Device ID
Serial.print("Getting Device ID... ");
unique_device_id=EEPROMReadInt(0);
if (unique_device_id<10000 || unique_device_id>60000) {
Serial.print("N/A, updating... ");
unique_device_id=random(10000, 60000);
EEPROMWriteInt(0, unique_device_id);
}
Serial.println(unique_device_id);
}
void loop()
{
uptime=round(millis()/1000);
if (uptime!=old_uptime) {
Serial.print("Uptime: ");
Serial.println(uptime);
old_uptime=uptime;
}
if (Serial.available()) {
char c=Serial.read();
if (c == '\n' || c == ';')
{
Serial.println(inData);
if (inData.equals("blink")) {
Serial.println("BLINKING!");
} else {
Serial.print("Unknown command: ");
Serial.println(inData);
}
inData="";
Serial.flush();
} else {
inData += (c);
}
}
if(ET.receiveData())
{
digitalWrite(led_pin, HIGH);
if (last_packet_id!=(int)mydata.packet_id) {
Serial.print("P:");
Serial.print(mydata.packet_id);
Serial.print(";F:");
Serial.print(mydata.device_id);
Serial.print(";T:");
Serial.print(mydata.destination_id);
Serial.print(";C:");
Serial.print(mydata.command);
Serial.print(";D:");
Serial.print(mydata.data);
Serial.println(";");
last_packet_id=(int)mydata.packet_id;
}
digitalWrite(led_pin, LOW);
}
}
Настройка правил
Для текущего предназначения устройства нам достаточно одного правила следующего вида:
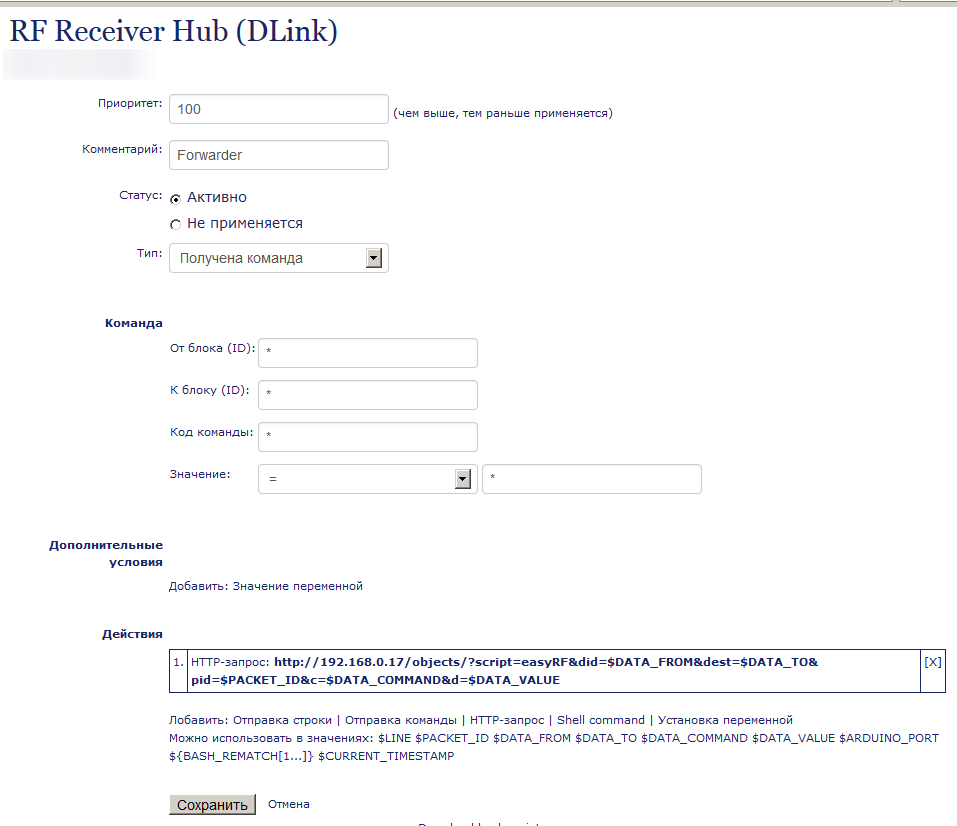
Вот и всё, мы получили устройство-ретранслятор показаний датчиков на нашу центральную веб-систему. Вместо рентранслятора может быть сделан, к примеру, обработчик, который посылает определённую команду назад в контроллер при превышении каких-то контрольных значений.
Соединение с интернетом требуется только для первоначальной загрузки правила, далее модуль работает совершенно автономно.